Pequi
Angehender Modder
Moinsen,
hier möchte ich im Detail Infos zur Programmierung einer mikrokontrollergesteuerten RapidStrike darlegen:
geplante Modifikationen:
- Umbau des FWCs auf DrS oder Artifacts (Gold oder Rot)
- Motoren: - 2x Slotdevil für die Treibräder
- evtl. Ersatz des Pushermotors durch Slotdevil. Eher nicht notwendig, da keine extreme Kadenz gewünscht ist
- Betrieb der Treibradmotoren mit 3s-Lipo (11,1V nominal)
- Schaltung der Treibmotoren und des Pushermotors mittels MOSFETs und damit eine Aufteilung der Stromkreise in einen "Niedrigenergetischen" und einen "Hochenergetischen"
- Steuerung aller Funktionen mittel Arduino-Mikrokontroller (Entwicklung auf Arduino Uno)
- Einstellbarkeit der Treibmotorgeschwindigkeiten in drei Stufen (Feuerkraft), der Pushergeschwindigkeit in drei Stufen (Kadenz), des Schußmodus (Einzel-, 3er-, Dauerfeuer)
- Zählung der Schüsse und Vorwahl der verwendeten Magazingröße
- Akkuüberwachung mit Unterspannungswarnung und automatischer Abschaltung
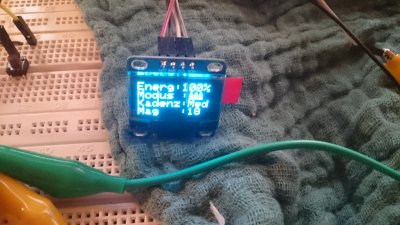
- Ausgabe aller Informationen über ein sehr kleines OLED-Display (0,96", I2C, 128x64 Pixel, s/w)
- ggf. Ausgabe von Sounds
Da die umzubauende RapidStrike mir noch nicht vorliegt, die elektronischen Bauteile allerdings im Verlauf eingetrudelt sind, habe ich auf dem Steckbrett bereits alles zusammengebaut. Bei voller Funktionalität ist geplant, das Arduino Uno-Board gegen ein bereits erworbenes sehr kleines zu tauschen. Evtl. auch nur den reinen Prozessor mit einigen kleinen Bauteilen drumherum.
Die ersten Programmierexperimente verliefen recht vielversprechend. Allein, der verbaute MOSFET wollte sich vom Arduino-Board nicht steuern lassen, weil er mit den kleinen Steuerspannungen nicht zurechtkam. Daher wurde er gegen einen FQP30N06L mit einer Schaltleistung von 25V bei 30A getauscht. Versuche, die Motoren mit einem noch rumfliegenden ESC (Electronic Speed Controller => Fahrtregler) aus dem Modellbau zu betreiben, verliefen ebenfalls problemlos. Allerdings ist der zwar von der Bauform sehr klein gehaltene ESC dennoch Overkill in einem Spielzeugblaster (Bürstenmotoren mit einer Stromlast bis zu 70A bei einer Spannung bis 25V!). Und auch trotzdem zu groß...MOSFETs sind kleiner und billiger.
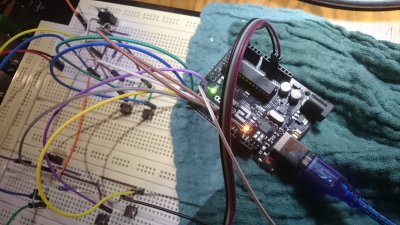
Hier mal alles durcheinander, der fliegende Aufbau:
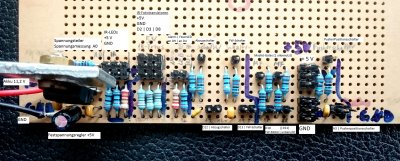
Weg vom fliegenden Aufbau hin zur Lochrasterplatine - getestet und für gut befunden:
Die "Lowside":

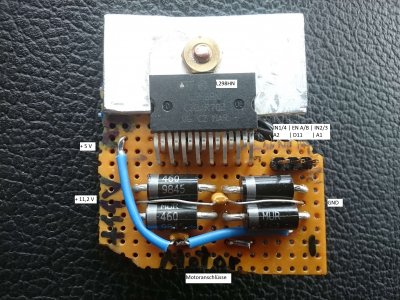
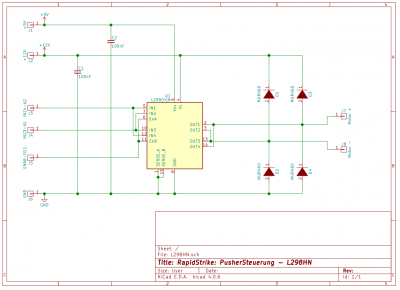
Die PusherSteuerung mit der H-Brücke:
verkabelt mit dem Uno R3:


Die "Highside" wird nicht auf Platine gedengelt, sondern in die Kabel integriert.
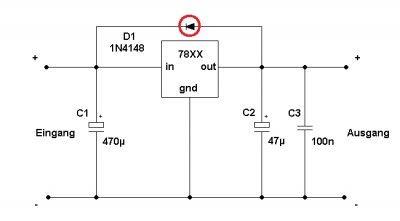
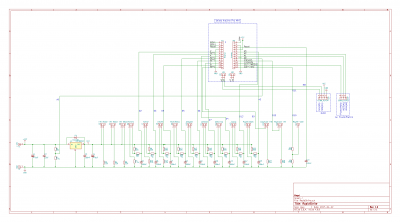
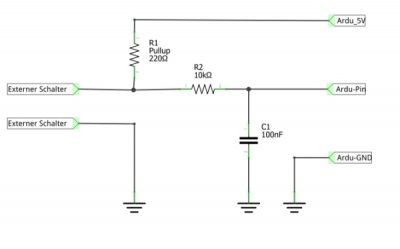
Schaltplan der Hardware zugefügt:
Haftung für Korrektheit wird ausgeschlossen!
@Lorcan: könntest Du bitte Dein geschultes Auge darüberschweifen lassen?
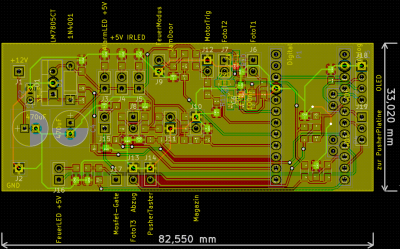
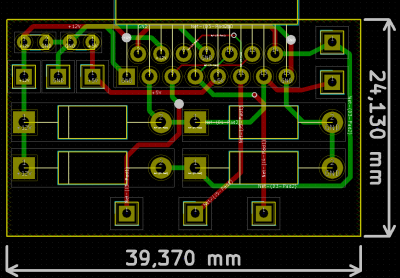
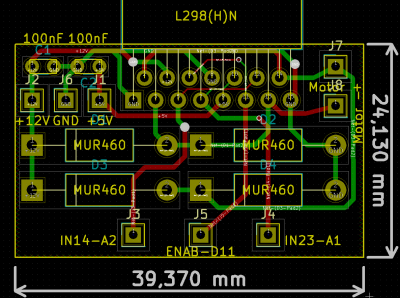
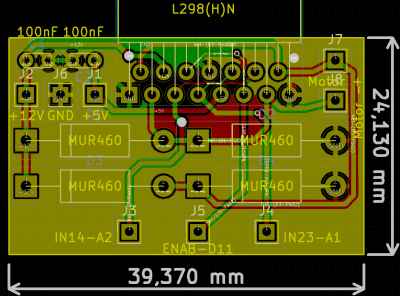
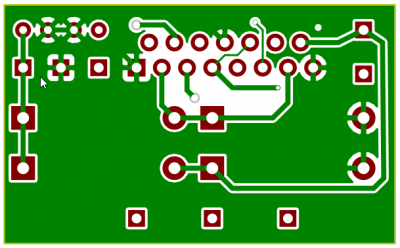
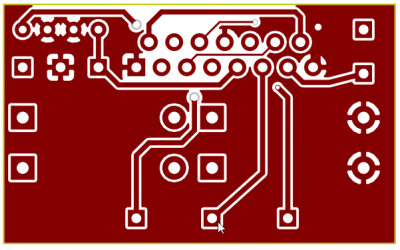
Hier jetzt die Pushermotorsteuerung mit Platinenlayout:

Die Grundfunktionalität steht:
Ich kann:
- den Schußmodus mittels eines in Griffnähe einzubauenden Mikrotasters einstellen
- die Feuerkraft einstellen (Jamdoor offen und mit Abzug auswählen
- die Kadenz ändern: Jamdoor offen und mit Motortrigger auswählen
- Anzahl der verschossenen Projektile zählen und von der einzustellenden Magazingröße abziehen
- die Magazingröße aus einer vorgegebenen Anzahl einstellen (Jamdoor offen und Feuermodustaster betätigen)
Ist die Jamdoor offen oder kein Magazin eingelegt, ist ein Starten der Motoren oder des Pushers nicht möglich.
Die Schußmodi (Einzelschuß, 3er-Salve, Dauerfeuer) verlaufen so:
- Betätigen des Motortriggers entsperrt den Abzug elektronisch.
- wird bei betätigtem Motortrigger (Flywheels laufen) der Abzug betätigt, wird ein Einzelschuß/3er-Salve abgegeben, auch wenn der Abzug losgelassen wird.
ToDo:
- Speicherung der Voreinstellungen im EEPROM
- Einbau und Umbau des elektronischen Geraffels auf die kleinstmögliche Abmessung
- erledigt:Spannungsüberwachung
- Soundausgabe
- erledigt:Blink-Blink-LEDs, wenn das Magazin leer ist
- erledigt:Lichtschranken zur Geschwindigkeitsmessung der Darts
- erledigt:Lichtschranke zur Erfassung, ob Dart im Magazin ist und dann erst Pusher auslösen
- erledigt:Ladehemmungserkennung: Erfassen, ob ein Dart auch den FWC verlassen hat -> weitere Lichtschranke einbauen -> Kombination mit Geschwindigkeitsmessung
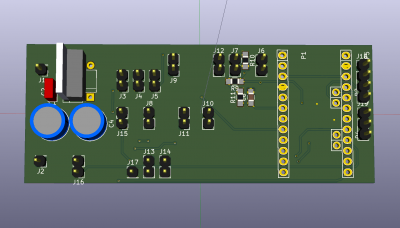
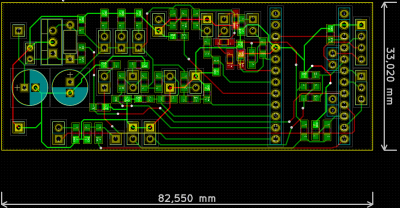
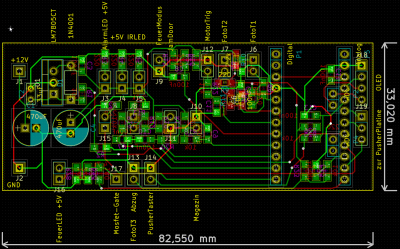
Bauteileliste Hauptplatine mit Arduino:
- 1x Diode 1N4001
- 5x Diode MUR460
- 1x L298HN
- 1x Mosfet FQP30N06L
- 11x Widerstand 10k Ohm
- 1x Widerstand 4,7k Ohm
- 14x Widerstand 220 Ohm
- 3x Widerstand 2,2k Ohm
- 3x IR-LED, z.B. IRL 81A (880nm)
- 3x IR-Phototransistor, z.B. LPT 80A Inf (400-1100nm, max 880nm)
- Keramik-Kondensatoren:
- 1x 0,33uF
- 11x 100nF
- 2x 470uF Elko
- 2x rote LED
- 1x Festspannungsregler L78S05CV
- 1x OLED Display SSD1306 i2c 128x64 Pixel, z.B. Adafruit
Bauteileliste Pushersteuerung:
- 1x L298HN
- 4x Diode MUR460
- 2x Keramikkondensator 100nF
hier möchte ich im Detail Infos zur Programmierung einer mikrokontrollergesteuerten RapidStrike darlegen:
geplante Modifikationen:
- Umbau des FWCs auf DrS oder Artifacts (Gold oder Rot)
- Motoren: - 2x Slotdevil für die Treibräder
- evtl. Ersatz des Pushermotors durch Slotdevil. Eher nicht notwendig, da keine extreme Kadenz gewünscht ist
- Betrieb der Treibradmotoren mit 3s-Lipo (11,1V nominal)
- Schaltung der Treibmotoren und des Pushermotors mittels MOSFETs und damit eine Aufteilung der Stromkreise in einen "Niedrigenergetischen" und einen "Hochenergetischen"
- Steuerung aller Funktionen mittel Arduino-Mikrokontroller (Entwicklung auf Arduino Uno)
- Einstellbarkeit der Treibmotorgeschwindigkeiten in drei Stufen (Feuerkraft), der Pushergeschwindigkeit in drei Stufen (Kadenz), des Schußmodus (Einzel-, 3er-, Dauerfeuer)
- Zählung der Schüsse und Vorwahl der verwendeten Magazingröße
- Akkuüberwachung mit Unterspannungswarnung und automatischer Abschaltung
- Ausgabe aller Informationen über ein sehr kleines OLED-Display (0,96", I2C, 128x64 Pixel, s/w)
- ggf. Ausgabe von Sounds
Da die umzubauende RapidStrike mir noch nicht vorliegt, die elektronischen Bauteile allerdings im Verlauf eingetrudelt sind, habe ich auf dem Steckbrett bereits alles zusammengebaut. Bei voller Funktionalität ist geplant, das Arduino Uno-Board gegen ein bereits erworbenes sehr kleines zu tauschen. Evtl. auch nur den reinen Prozessor mit einigen kleinen Bauteilen drumherum.
Die ersten Programmierexperimente verliefen recht vielversprechend. Allein, der verbaute MOSFET wollte sich vom Arduino-Board nicht steuern lassen, weil er mit den kleinen Steuerspannungen nicht zurechtkam. Daher wurde er gegen einen FQP30N06L mit einer Schaltleistung von 25V bei 30A getauscht. Versuche, die Motoren mit einem noch rumfliegenden ESC (Electronic Speed Controller => Fahrtregler) aus dem Modellbau zu betreiben, verliefen ebenfalls problemlos. Allerdings ist der zwar von der Bauform sehr klein gehaltene ESC dennoch Overkill in einem Spielzeugblaster (Bürstenmotoren mit einer Stromlast bis zu 70A bei einer Spannung bis 25V!). Und auch trotzdem zu groß...MOSFETs sind kleiner und billiger.
Hier mal alles durcheinander, der fliegende Aufbau:
Weg vom fliegenden Aufbau hin zur Lochrasterplatine - getestet und für gut befunden:
Die "Lowside":
Die PusherSteuerung mit der H-Brücke:
verkabelt mit dem Uno R3:
Die "Highside" wird nicht auf Platine gedengelt, sondern in die Kabel integriert.
Schaltplan der Hardware zugefügt:
Haftung für Korrektheit wird ausgeschlossen!
@Lorcan: könntest Du bitte Dein geschultes Auge darüberschweifen lassen?
Hier jetzt die Pushermotorsteuerung mit Platinenlayout:
Die Grundfunktionalität steht:
Ich kann:
- den Schußmodus mittels eines in Griffnähe einzubauenden Mikrotasters einstellen
- die Feuerkraft einstellen (Jamdoor offen und mit Abzug auswählen
- die Kadenz ändern: Jamdoor offen und mit Motortrigger auswählen
- Anzahl der verschossenen Projektile zählen und von der einzustellenden Magazingröße abziehen
- die Magazingröße aus einer vorgegebenen Anzahl einstellen (Jamdoor offen und Feuermodustaster betätigen)
Ist die Jamdoor offen oder kein Magazin eingelegt, ist ein Starten der Motoren oder des Pushers nicht möglich.
Die Schußmodi (Einzelschuß, 3er-Salve, Dauerfeuer) verlaufen so:
- Betätigen des Motortriggers entsperrt den Abzug elektronisch.
- wird bei betätigtem Motortrigger (Flywheels laufen) der Abzug betätigt, wird ein Einzelschuß/3er-Salve abgegeben, auch wenn der Abzug losgelassen wird.
ToDo:
- Speicherung der Voreinstellungen im EEPROM
- Einbau und Umbau des elektronischen Geraffels auf die kleinstmögliche Abmessung
- erledigt:
- Soundausgabe
- erledigt:
- erledigt:
- erledigt:
- erledigt:
Bauteileliste Hauptplatine mit Arduino:
- 1x Diode 1N4001
- 5x Diode MUR460
- 1x L298HN
- 1x Mosfet FQP30N06L
- 11x Widerstand 10k Ohm
- 1x Widerstand 4,7k Ohm
- 14x Widerstand 220 Ohm
- 3x Widerstand 2,2k Ohm
- 3x IR-LED, z.B. IRL 81A (880nm)
- 3x IR-Phototransistor, z.B. LPT 80A Inf (400-1100nm, max 880nm)
- Keramik-Kondensatoren:
- 1x 0,33uF
- 11x 100nF
- 2x 470uF Elko
- 2x rote LED
- 1x Festspannungsregler L78S05CV
- 1x OLED Display SSD1306 i2c 128x64 Pixel, z.B. Adafruit
Bauteileliste Pushersteuerung:
- 1x L298HN
- 4x Diode MUR460
- 2x Keramikkondensator 100nF
Anhänge
-
 DSC_0097.JPG2,2 MB · Aufrufe: 37
DSC_0097.JPG2,2 MB · Aufrufe: 37 -
 DSC_0098.JPG2,1 MB · Aufrufe: 35
DSC_0098.JPG2,1 MB · Aufrufe: 35 -
 Lochraster-2.jpg418,3 KB · Aufrufe: 23
Lochraster-2.jpg418,3 KB · Aufrufe: 23 -
 RapidStrikLowSide-2.jpg781,1 KB · Aufrufe: 25
RapidStrikLowSide-2.jpg781,1 KB · Aufrufe: 25 -
 RapidStrike-lowSide-1.jpg1.008,9 KB · Aufrufe: 31
RapidStrike-lowSide-1.jpg1.008,9 KB · Aufrufe: 31 -
 PusherSteuerung-1.jpg1,8 MB · Aufrufe: 24
PusherSteuerung-1.jpg1,8 MB · Aufrufe: 24 -
 RS-PusherSteuerung-L298-PlatineVS.png38,1 KB · Aufrufe: 17
RS-PusherSteuerung-L298-PlatineVS.png38,1 KB · Aufrufe: 17 -
 RS-PusherSteuerung-L298-PlatineRS.png36,5 KB · Aufrufe: 18
RS-PusherSteuerung-L298-PlatineRS.png36,5 KB · Aufrufe: 18 -
 RS-PusherSteuerung-L298-Platine.png96,9 KB · Aufrufe: 18
RS-PusherSteuerung-L298-Platine.png96,9 KB · Aufrufe: 18 -
 RS-PusherSteuerung-L298-Platine-Text-Masse.png118,1 KB · Aufrufe: 17
RS-PusherSteuerung-L298-Platine-Text-Masse.png118,1 KB · Aufrufe: 17 -
 RS-PusherSteuerung-L298-Platine-Text.png114,5 KB · Aufrufe: 17
RS-PusherSteuerung-L298-Platine-Text.png114,5 KB · Aufrufe: 17 -
 RS-PusherSteuerung-L298-Schaltplan.png80,3 KB · Aufrufe: 27
RS-PusherSteuerung-L298-Schaltplan.png80,3 KB · Aufrufe: 27 -
 RapidStrike.png81,6 KB · Aufrufe: 29
RapidStrike.png81,6 KB · Aufrufe: 29 -
 RapidStrikeRS.png116,4 KB · Aufrufe: 18
RapidStrikeRS.png116,4 KB · Aufrufe: 18 -
 RapidStrike-B.Cu.png140,5 KB · Aufrufe: 19
RapidStrike-B.Cu.png140,5 KB · Aufrufe: 19 -
 RapidStrikeVS.png94,4 KB · Aufrufe: 16
RapidStrikeVS.png94,4 KB · Aufrufe: 16 -
 RapidStrike-F.Cu.png113,8 KB · Aufrufe: 17
RapidStrike-F.Cu.png113,8 KB · Aufrufe: 17 -
 Kicad-Platine_RapidS.png207,4 KB · Aufrufe: 17
Kicad-Platine_RapidS.png207,4 KB · Aufrufe: 17 -
 Kicad-Platine_RapidS-ohneFläche-ohneText.png170,8 KB · Aufrufe: 17
Kicad-Platine_RapidS-ohneFläche-ohneText.png170,8 KB · Aufrufe: 17 -
 Kicad-Platine_RapidS-ohneFläche.png219,5 KB · Aufrufe: 17
Kicad-Platine_RapidS-ohneFläche.png219,5 KB · Aufrufe: 17
Zuletzt bearbeitet:


")